La programación de robots más flexible
El post de hoy de DeROBÓTICA va dedicado a dos tipos de personas: a los programadores de los robots industriales, y a los responsables de organizar y coordinar los sistemas de gestión de una fábrica o centro de producción.
Los programadores están acostumbrados a tener que adaptarse a las exigencias que el fabricante de robots les impone: un solo software propietario del fabricante o incluso, en algunos casos, el robot sólo puede programarse desde la consola de programación. La complejidad que esto añade, implica más tiempo y esfuerzo, y una ineficiencia incomprensible hoy en día para muchos programadores.
Al mismo tiempo, esta dependencia que tienen habitualmente los dispositivos de un software propietario, en ocasiones suele traer de cabeza a los responsables de fábrica, producción o de coordinación de sistemas. La posibilidad de estandarizar sistemas es muy limitada, y se debe pasar por los diferentes softwares propietarios de cada dispositivo.
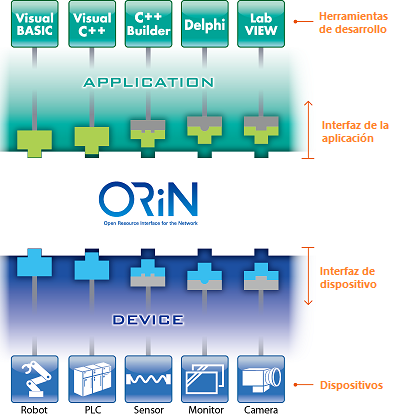
Pero todo esto cambia con los robots DENSO: ahora puedes programar tus robots del modo que necesites. Es la flexibilidad en la programación de robots llevada al extremo. El diagrama siguiente resumen perfectamente las posibilidades que ofrecemos:
¿Significa esto que DENSO no cuenta con un software de programación propietario? No, por supuesto que también se ofrece esta opción. El software WINCAPSIII, sobre el que hablaremos en futuros posts de este blog, permite programar los robots en lenguaje PacScript. WINCAPSIII permite llevar a cabo la programación de uno o varios robots, realizando simulaciones 3D del entorno de trabajo en modo offline, e incluyendo multitud de funcionalidades como la optimización del tiempo de ciclo del robot. Al mismo tiempo, desde la propia consola de programación también se puede programar el robot, si bien es cierto que esta opción solo se suele utilizar para realizar ajustes in-situ.
¿Y qué más? Porque hasta ahora esto recuerda a lo de siempre… Pues DENSO también permite la programación de robots directamente desde el PLC. Soporta más del 90 % de las redes globales: Profibus, Profinet, CC-Link, DeviceNet, EtherNet/IP, EtherCAT, etc. Tiene acuerdos con otras plataformas de programación, como Halcon o Labview, de modo que desde estas plataformas también puedes programar un DENSO.
¿Necesitas todavía más flexibilidad? En ese caso, te recomendamos que utilices la SDK de ORiN2 (Open Robot/Resource interface for the Network), de la que también hablaremos en futuros posts. A través de estas librerías, podrás programar nuestros robots DENSO, así como otros dispositivos periféricos (cámaras de visión artificial, sensores, etc.) con múltiples lenguajes de programación como C++, C#, VB, etc. Y si no quieres tener que utilizar Windows, tienes a tu disposición el protocolo B-CAP (Binary Controller Access Protocol), basado en el envío de paquetes TCP/IP e independiente por tanto de cualquier sistema operativo.
Si eres un programador, utilizar el modo de programar que te resulte más cómodo. Y si eres el responsable de coordinar los sistemas de tu fábrica, utiliza aquel método que te permita integrar el robot en los sistemas ya existentes. Escoge el método que necesites y simplemente utilízalo.
Para más información, no dudes en preguntarnos a través del formulario de contacto DEROBÓTICA, el distribuidor de todos los robots de DENSO España.
Carrer Fundició 79,
Puerto de Sagunto, Valencia
46520
Horario de Atención:
Lunes a jueves de 9:00-18:30.
Viernes de 9:00-14:00
Telf: 962 67 36 81